
Yan Yan, et al. “SECOND: Sparsely Embedded Convolutional Detection”. (2018)
<초록>
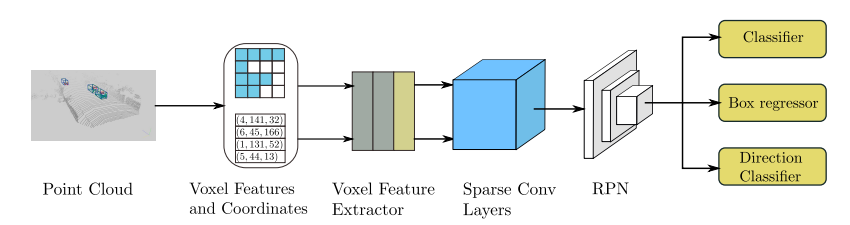
Voxel 기반 3D 컨볼루션 네트워크는 포인트 클라우드 LiDAR 데이터를 처리할 때 정보의 보존을 강화하기 위해 한동안 사용되어 왔다. 그러나 느린 추론 속도와 낮은 방향 추정 성능을 포함한 문제가 남아 있다.
따라서 우리는 훈련과 추론 모두의 속도를 크게 높이는 그러한 네트워크에 대한 개선된 sparse convolution method을 조사한다.
또한 방향(the orientation) 추정 성능을 개선하기 위한 새로운 형태의 angle loss regression와 수렴 속도와 성능을 향상시킬 수 있는 new data augmentation approach을 소개한다.
제안된 네트워크는 빠른 추론 속도를 유지하면서 KITTI 3D 객체 감지 벤치마크에서 최첨단 결과를 생성한다.
'Project > 무지성 논문 초록 읽기' 카테고리의 다른 글
| [초록 읽기] PointPillars (2019) (0) | 2022.08.18 |
|---|---|
| [초록 읽기] VoxelNet (2017) (0) | 2022.08.18 |
| [초록 읽기] PointNet (2017) (0) | 2022.08.18 |