[MMDetection3D] Pointpillars 학습
config file
voxel_size = [0.25, 0.25, 8]
model = dict(
type='VoxelNet',
voxel_layer=dict(
max_num_points=64,
point_cloud_range=[-50, -50, -5, 50, 50, 3],
voxel_size=[0.25, 0.25, 8],
max_voxels=(30000, 40000)),
voxel_encoder=dict(
type='HardVFE',
in_channels=4,
feat_channels=[64],
with_distance=False,
voxel_size=[0.25, 0.25, 8],
point_cloud_range=[-50, -50, -5, 50, 50, 3],
norm_cfg=dict(type='naiveSyncBN1d', eps=1e-3, momentum=0.01)),
middle_encoder=dict(
type='PointPillarsScatter', in_channels=64, output_shape=[400, 400]),
backbone=dict(
type='SECOND',
in_channels=64,
layer_nums=[3, 5, 5],
layer_strides=[2, 2, 2],
out_channels=[64, 128, 256]),
neck=dict(
type='SECONDFPN',
in_channels=[64, 128, 256],
upsample_strides=[1, 2, 4],
out_channels=[128, 128, 128]),
bbox_head=dict(
type='Anchor3DHead',
num_classes=1,
in_channels=384,
feat_channels=384,
use_direction_classifier=True,
assign_per_class=True,
anchor_generator=dict(
type='AlignedAnchor3DRangeGenerator',
ranges=[[-50, -50, -5, 50, 50, 3]],
sizes=[[3.9, 1.6, 1.56]],
rotations=[0, 1.57],
reshape_out=True),
diff_rad_by_sin=True,
bbox_coder=dict(type='DeltaXYZWLHRBBoxCoder'),
loss_cls=dict(
type='FocalLoss',
use_sigmoid=True,
gamma=2.0,
alpha=0.25,
loss_weight=1.0),
loss_bbox=dict(
type='SmoothL1Loss', beta=0.1111111111111111, loss_weight=2.0),
loss_dir=dict(
type='CrossEntropyLoss', use_sigmoid=False, loss_weight=0.2)),
train_cfg=dict(
assigner=dict(
type='MaxIoUAssigner',
iou_calculator=dict(type='BboxOverlapsNearest3D'),
pos_iou_thr=0.6,
neg_iou_thr=0.45,
min_pos_iou=0.45,
ignore_iof_thr=-1),
allowed_border=0,
pos_weight=-1,
debug=False),
test_cfg=dict(
use_rotate_nms=True,
nms_across_levels=False,
nms_thr=0.01,
score_thr=0.1,
min_bbox_size=0,
nms_pre=100,
max_num=50))
dataset_type = 'KittiDataset'
data_root = 'data/carla/'
class_names = ['vehicle']
point_cloud_range = [-50, -50, -5, 50, 50, 3]
input_modality = dict(use_lidar=True, use_camera=False)
file_client_args = dict(backend='disk')
db_sampler = dict(
data_root='data/carla/',
info_path='data/carla/kitti_dbinfos_train.pkl',
rate=1.0,
prepare=dict(
filter_by_difficulty=[-1],
filter_by_min_points=dict(Car=5, Pedestrian=5, Cyclist=5, vehicle=5)),
classes=['vehicle'],
sample_groups=dict(Car=15, Pedestrian=15, Cyclist=15, vehicle=15),
points_loader=dict(
type='LoadPointsFromFile',
coord_type='LIDAR',
load_dim=4,
use_dim=4,
file_client_args=dict(backend='disk')),
file_client_args=dict(backend='disk'))
train_pipeline = [
dict(type='LoadPointsFromFile', coord_type='LIDAR', load_dim=4, use_dim=4),
dict(type='LoadAnnotations3D', with_bbox_3d=True, with_label_3d=True),
dict(
type='ObjectSample',
db_sampler=dict(
data_root='data/carla/',
info_path='data/carla/kitti_dbinfos_train.pkl',
rate=1.0,
prepare=dict(
filter_by_difficulty=[-1],
filter_by_min_points=dict(vehicle=5)),
sample_groups=dict(vehicle=15),
classes=['vehicle']),
use_ground_plane=True),
dict(type='RandomFlip3D', flip_ratio_bev_horizontal=0.5),
dict(
type='GlobalRotScaleTrans',
rot_range=[-0.78539816, 0.78539816],
scale_ratio_range=[0.95, 1.05]),
dict(
type='PointsRangeFilter', point_cloud_range=[-50, -50, -5, 50, 50, 3]),
dict(
type='ObjectRangeFilter', point_cloud_range=[-50, -50, -5, 50, 50, 3]),
dict(type='PointShuffle'),
dict(type='DefaultFormatBundle3D', class_names=['vehicle']),
dict(type='Collect3D', keys=['points', 'gt_bboxes_3d', 'gt_labels_3d'])
]
test_pipeline = [
dict(type='LoadPointsFromFile', coord_type='LIDAR', load_dim=4, use_dim=4),
dict(
type='MultiScaleFlipAug3D',
img_scale=(1333, 800),
pts_scale_ratio=1,
flip=False,
transforms=[
dict(
type='GlobalRotScaleTrans',
rot_range=[0, 0],
scale_ratio_range=[1.0, 1.0],
translation_std=[0, 0, 0]),
dict(type='RandomFlip3D'),
dict(
type='PointsRangeFilter',
point_cloud_range=[-40, -40, -3, 40, 40, 2]),
dict(
type='DefaultFormatBundle3D',
class_names=['vehicle'],
with_label=False),
dict(type='Collect3D', keys=['points'])
])
]
eval_pipeline = [
dict(
type='LoadPointsFromFile',
coord_type='LIDAR',
load_dim=4,
use_dim=4,
file_client_args=dict(backend='disk')),
dict(
type='DefaultFormatBundle3D',
class_names=['vehicle', 'walker', 'pet'],
with_label=False),
dict(type='Collect3D', keys=['points'])
]
data = dict(
samples_per_gpu=1,
workers_per_gpu=1,
train=dict(
type='RepeatDataset',
times=2,
dataset=dict(
type='KittiDataset',
data_root='data/carla/',
ann_file='data/carla/kitti_infos_train.pkl',
split='training',
pts_prefix='velodyne',
pipeline=[
dict(
type='LoadPointsFromFile',
coord_type='LIDAR',
load_dim=4,
use_dim=4),
dict(
type='LoadAnnotations3D',
with_bbox_3d=True,
with_label_3d=True),
dict(
type='ObjectSample',
db_sampler=dict(
data_root='data/carla/',
info_path='data/carla/kitti_dbinfos_train.pkl',
rate=1.0,
prepare=dict(
filter_by_difficulty=[-1],
filter_by_min_points=dict(vehicle=5)),
sample_groups=dict(vehicle=15),
classes=['vehicle']),
use_ground_plane=True),
dict(type='RandomFlip3D', flip_ratio_bev_horizontal=0.5),
dict(
type='GlobalRotScaleTrans',
rot_range=[-0.78539816, 0.78539816],
scale_ratio_range=[0.95, 1.05]),
dict(
type='PointsRangeFilter',
point_cloud_range=[-50, -50, -5, 50, 50, 3]),
dict(
type='ObjectRangeFilter',
point_cloud_range=[-50, -50, -5, 50, 50, 3]),
dict(type='PointShuffle'),
dict(type='DefaultFormatBundle3D', class_names=['vehicle']),
dict(
type='Collect3D',
keys=['points', 'gt_bboxes_3d', 'gt_labels_3d'])
],
modality=dict(use_lidar=True, use_camera=False),
classes=['vehicle'],
test_mode=False,
box_type_3d='LiDAR',
file_client_args=dict(backend='disk'))),
val=dict(
type='KittiDataset',
data_root='data/carla/',
ann_file='data/carla/kitti_infos_val.pkl',
split='training',
pts_prefix='velodyne',
pipeline=[
dict(
type='LoadPointsFromFile',
coord_type='LIDAR',
load_dim=4,
use_dim=4),
dict(
type='MultiScaleFlipAug3D',
img_scale=(1333, 800),
pts_scale_ratio=1,
flip=False,
transforms=[
dict(
type='GlobalRotScaleTrans',
rot_range=[0, 0],
scale_ratio_range=[1.0, 1.0],
translation_std=[0, 0, 0]),
dict(type='RandomFlip3D'),
dict(
type='PointsRangeFilter',
point_cloud_range=[-50, -50, -5, 50, 50, 3]),
dict(
type='DefaultFormatBundle3D',
class_names=['vehicle'],
with_label=False),
dict(type='Collect3D', keys=['points'])
])
],
modality=dict(use_lidar=True, use_camera=False),
classes=['vehicle'],
test_mode=True,
box_type_3d='LiDAR',
file_client_args=dict(backend='disk')),
test=dict(
type='KittiDataset',
data_root='data/carla/',
ann_file='data/carla/kitti_infos_val.pkl',
split='training',
pts_prefix='velodyne',
pipeline=[
dict(
type='LoadPointsFromFile',
coord_type='LIDAR',
load_dim=4,
use_dim=4),
dict(
type='MultiScaleFlipAug3D',
img_scale=(1333, 800),
pts_scale_ratio=1,
flip=False,
transforms=[
dict(
type='GlobalRotScaleTrans',
rot_range=[0, 0],
scale_ratio_range=[1.0, 1.0],
translation_std=[0, 0, 0]),
dict(type='RandomFlip3D'),
dict(
type='PointsRangeFilter',
point_cloud_range=[-50, -50, -5, 50, 50, 3]),
dict(
type='DefaultFormatBundle3D',
class_names=['vehicle'],
with_label=False),
dict(type='Collect3D', keys=['points'])
])
],
modality=dict(use_lidar=True, use_camera=False),
classes=['vehicle'],
test_mode=True,
box_type_3d='LiDAR',
file_client_args=dict(backend='disk')))
evaluation = dict(
interval=2,
pipeline=[
dict(
type='LoadPointsFromFile',
coord_type='LIDAR',
load_dim=4,
use_dim=4,
file_client_args=dict(backend='disk')),
dict(
type='DefaultFormatBundle3D',
class_names=['vehicle', 'walker', 'pet'],
with_label=False),
dict(type='Collect3D', keys=['points'])
])
lr = 0.001
optimizer = dict(type='AdamW', lr=0.001, betas=(0.95, 0.99), weight_decay=0.01)
optimizer_config = dict(grad_clip=dict(max_norm=35, norm_type=2))
lr_config = dict(
policy='cyclic',
target_ratio=(10, 0.0001),
cyclic_times=1,
step_ratio_up=0.4)
momentum_config = dict(
policy='cyclic',
target_ratio=(0.8947368421052632, 1),
cyclic_times=1,
step_ratio_up=0.4)
runner = dict(type='EpochBasedRunner', max_epochs=120)
checkpoint_config = dict(interval=20)
log_config = dict(
interval=10,
hooks=[dict(type='TextLoggerHook'),
dict(type='TensorboardLoggerHook')])
dist_params = dict(backend='nccl')
log_level = 'INFO'
work_dir = './work_dirs/hv_pointpillars_secfpn_1x1_160e_carla-3d-car'
load_from = None
resume_from = None
workflow = [('train', 1)]
opencv_num_threads = 0
mp_start_method = 'fork'
gpu_ids = [0]
pointcloud range와 voxel size를 수정해주었고
pcd를 velodyne_reduced가 아니라 velodyne로 하겠끔 수정해주었습니다.
학습 전 데이터 확인
python tools/misc/browse_dataset.py work_dirs/hv_pointpillars_secfpn_1x1_160e_carla-3d-car.py --task det --output-dir showdir/ --online
몇 개 확인해봤는데 잘 나옵니다.
Train
python ./tools/train.py work_dirs/hv_pointpillars_secfpn_1x1_160e_carla-3d-car.py --work-dir work_dirs학습을 진행합니다. epochs는 config에서 확인할 수 있듯이 120번으로 해주었습니다.
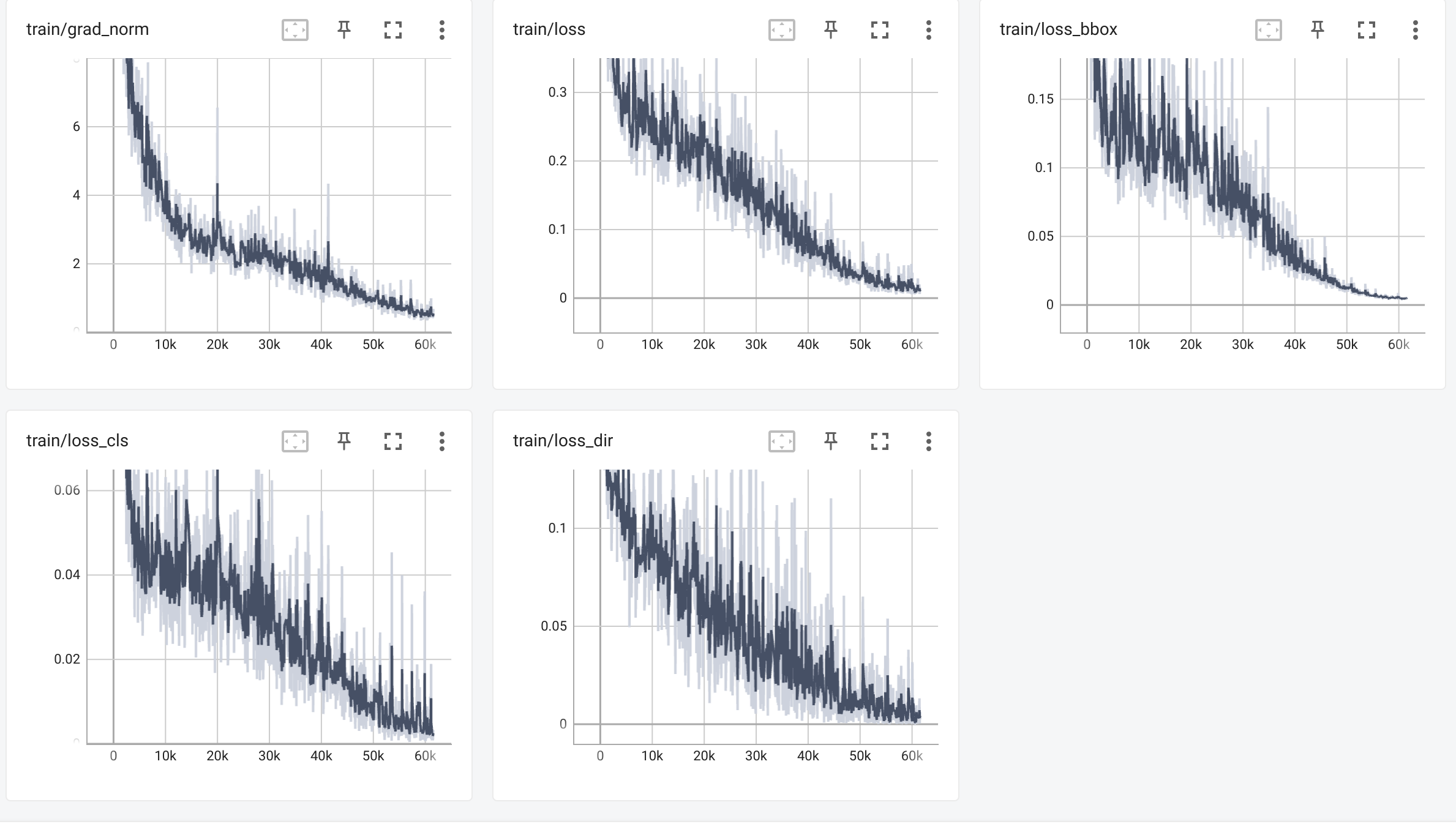
학습이 잘 됩니다.
validation 항목은 안나왔는데 이건 코드를 따로 만들어줘야할 것 같아요.
Test
python tools/test.py ./work_dirs/hv_pointpillars_secfpn_1x1_160e_carla-3d-car.py work_dirs/latest.pth --eval 'mAP' --eval-options 'show=True' 'out_dir=./showdir'
{'KITTI/vehicle_3D_AP11_easy_strict': 0.0,
'KITTI/vehicle_BEV_AP11_easy_strict': 0.0,
'KITTI/vehicle_2D_AP11_easy_strict': 0.0,
'KITTI/vehicle_3D_AP11_moderate_strict': 0.0,
'KITTI/vehicle_BEV_AP11_moderate_strict': 0.0,
'KITTI/vehicle_2D_AP11_moderate_strict': 0.0,
'KITTI/vehicle_3D_AP11_hard_strict': 0.0,
'KITTI/vehicle_BEV_AP11_hard_strict': 0.0, '
KITTI/vehicle_2D_AP11_hard_strict': 0.0,
'KITTI/vehicle_3D_AP11_easy_loose': 0.0,
'KITTI/vehicle_BEV_AP11_easy_loose': 0.0,
'KITTI/vehicle_2D_AP11_easy_loose': 0.0,
'KITTI/vehicle_3D_AP11_moderate_loose': 0.0, '
KITTI/vehicle_BEV_AP11_moderate_loose': 0.0,
'KITTI/vehicle_2D_AP11_moderate_loose': 0.0,
'KITTI/vehicle_3D_AP11_hard_loose': 0.0,
'KITTI/vehicle_BEV_AP11_hard_loose': 0.0,
'KITTI/vehicle_2D_AP11_hard_loose': 0.0,
'KITTI/vehicle_3D_AP40_easy_strict': 0.0,
'KITTI/vehicle_BEV_AP40_easy_strict': 0.0,
'KITTI/vehicle_2D_AP40_easy_strict': 0.0,
'KITTI/vehicle_3D_AP40_moderate_strict': 0.0,
'KITTI/vehicle_BEV_AP40_moderate_strict': 0.0,
'KITTI/vehicle_2D_AP40_moderate_strict': 0.0,
'KITTI/vehicle_3D_AP40_hard_strict': 0.0,
'KITTI/vehicle_BEV_AP40_hard_strict': 0.0,
'KITTI/vehicle_2D_AP40_hard_strict': 0.0,
'KITTI/vehicle_3D_AP40_easy_loose': 0.0,
'KITTI/vehicle_BEV_AP40_easy_loose': 0.0,
'KITTI/vehicle_2D_AP40_easy_loose': 0.0,
'KITTI/vehicle_3D_AP40_moderate_loose': 0.0,
'KITTI/vehicle_BEV_AP40_moderate_loose': 0.0,
'KITTI/vehicle_2D_AP40_moderate_loose': 0.0,
'KITTI/vehicle_3D_AP40_hard_loose': 0.0,
'KITTI/vehicle_BEV_AP40_hard_loose': 0.0,
'KITTI/vehicle_2D_AP40_hard_loose': 0.0}
result 레포트가 이모양으로 나온건
Image 를 안넣어줬기 때문인 것으로 보입니다.
직접 result를 출력하는 코드를 짜줘야할 것 같습니다.